Inertia Considerations
When Sizing Bell-Everman Rotary Stages
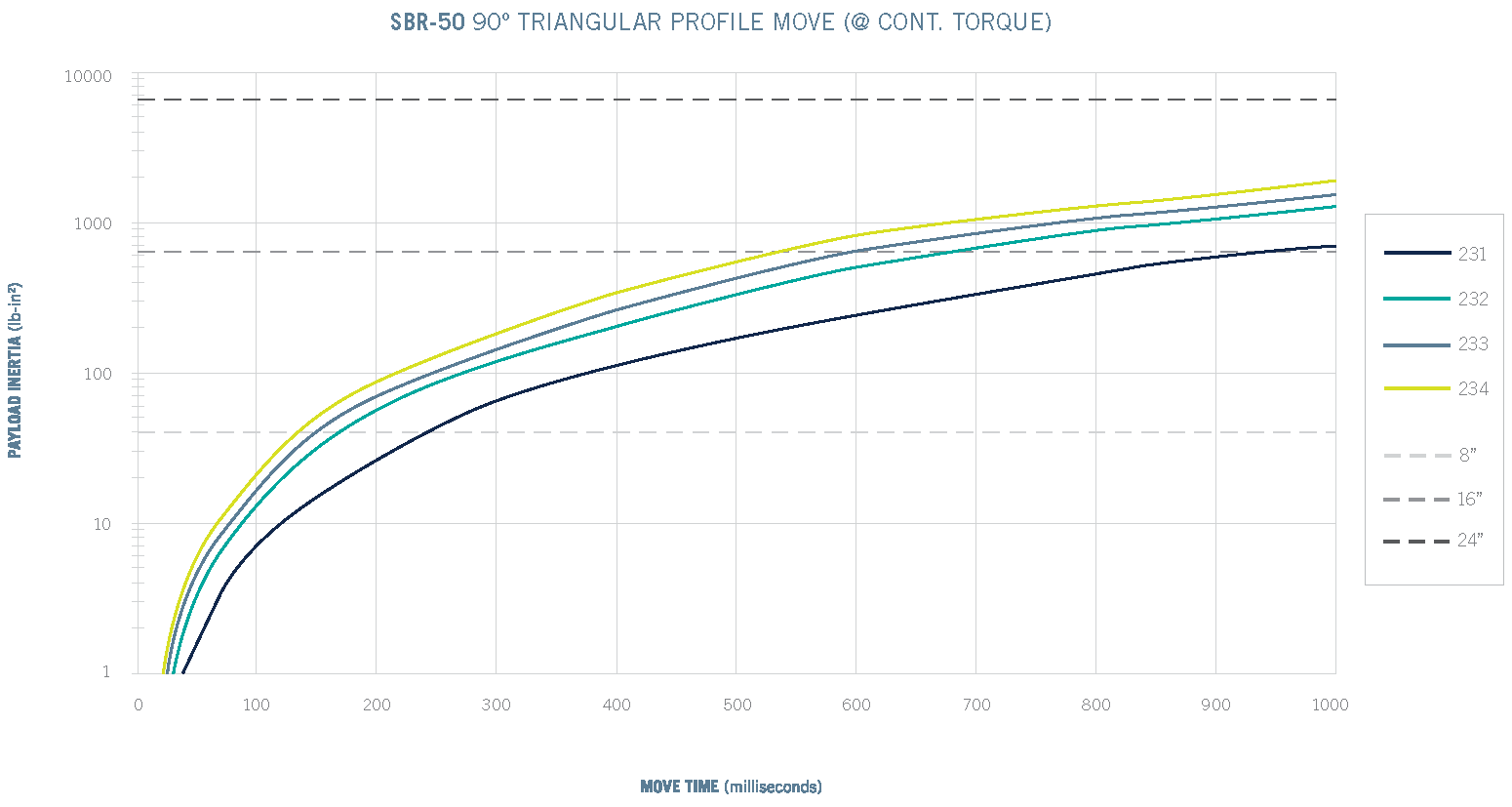
 Continuous Torque Examples
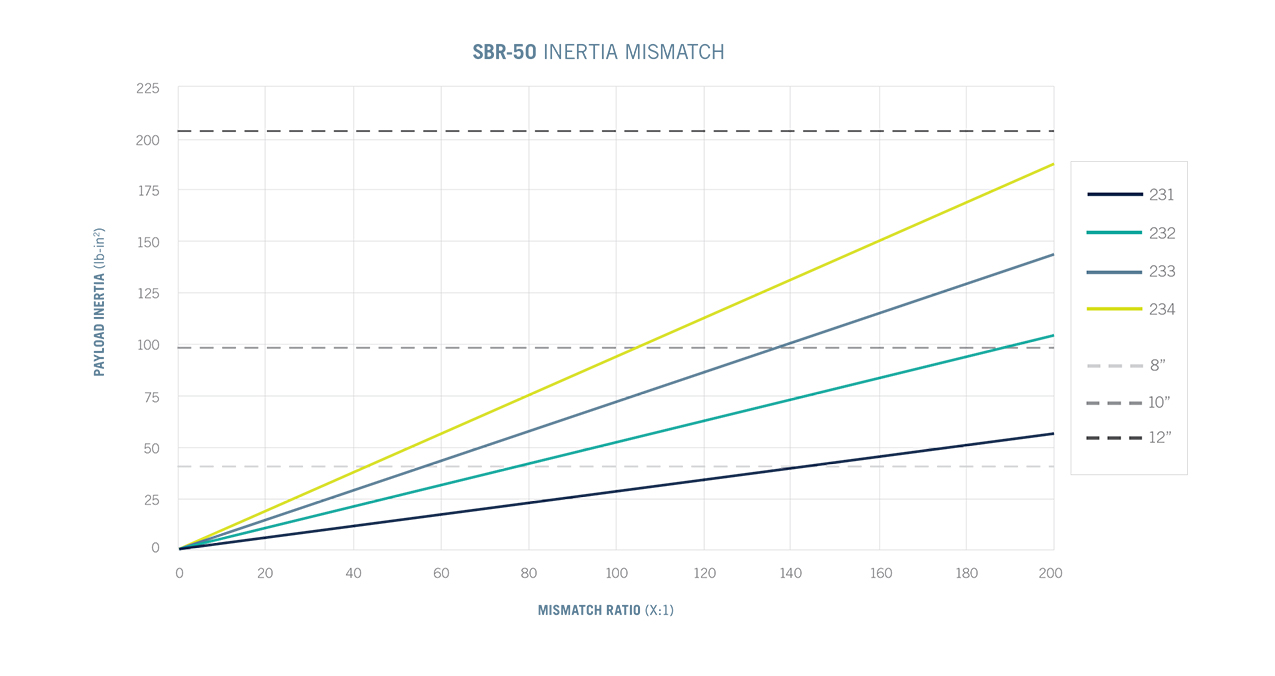
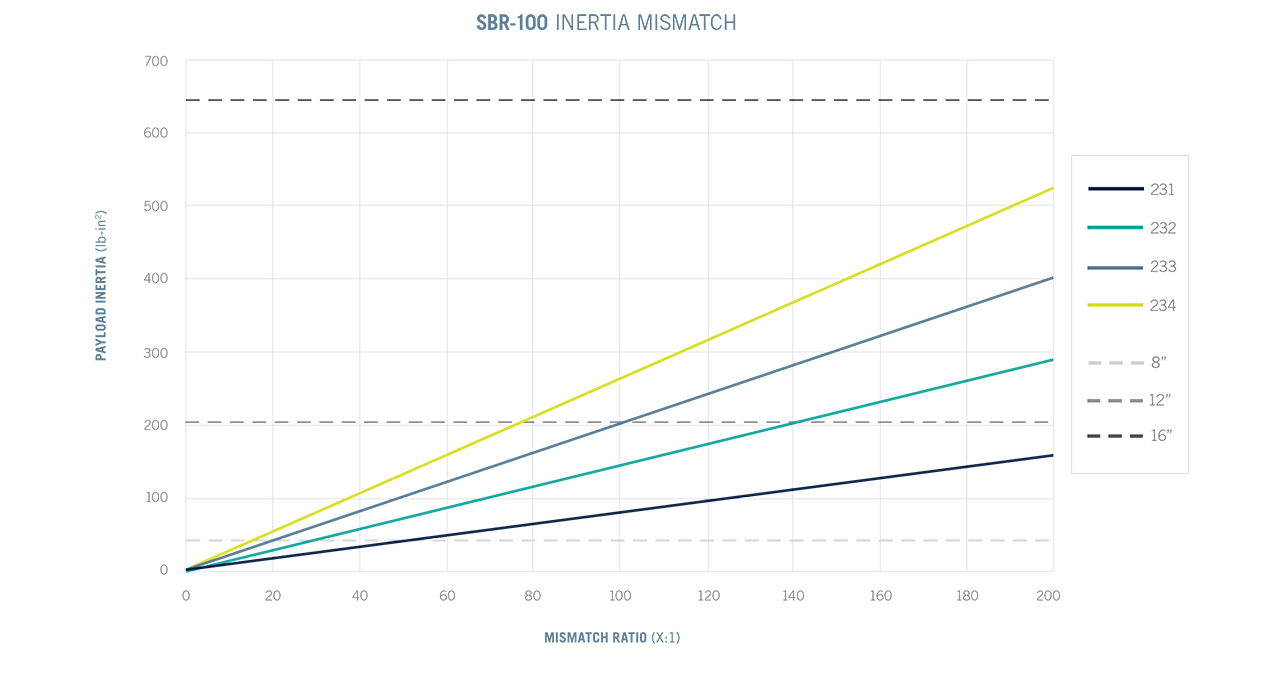
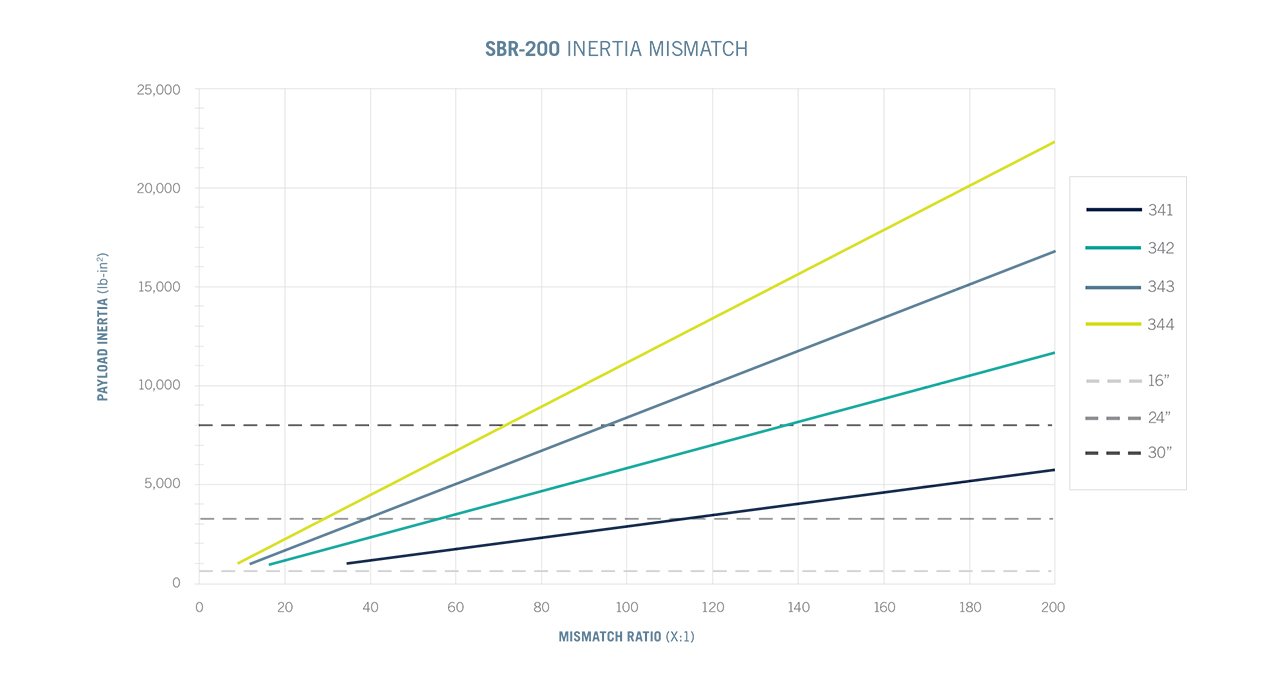
Inertia Mismatch Capabilities
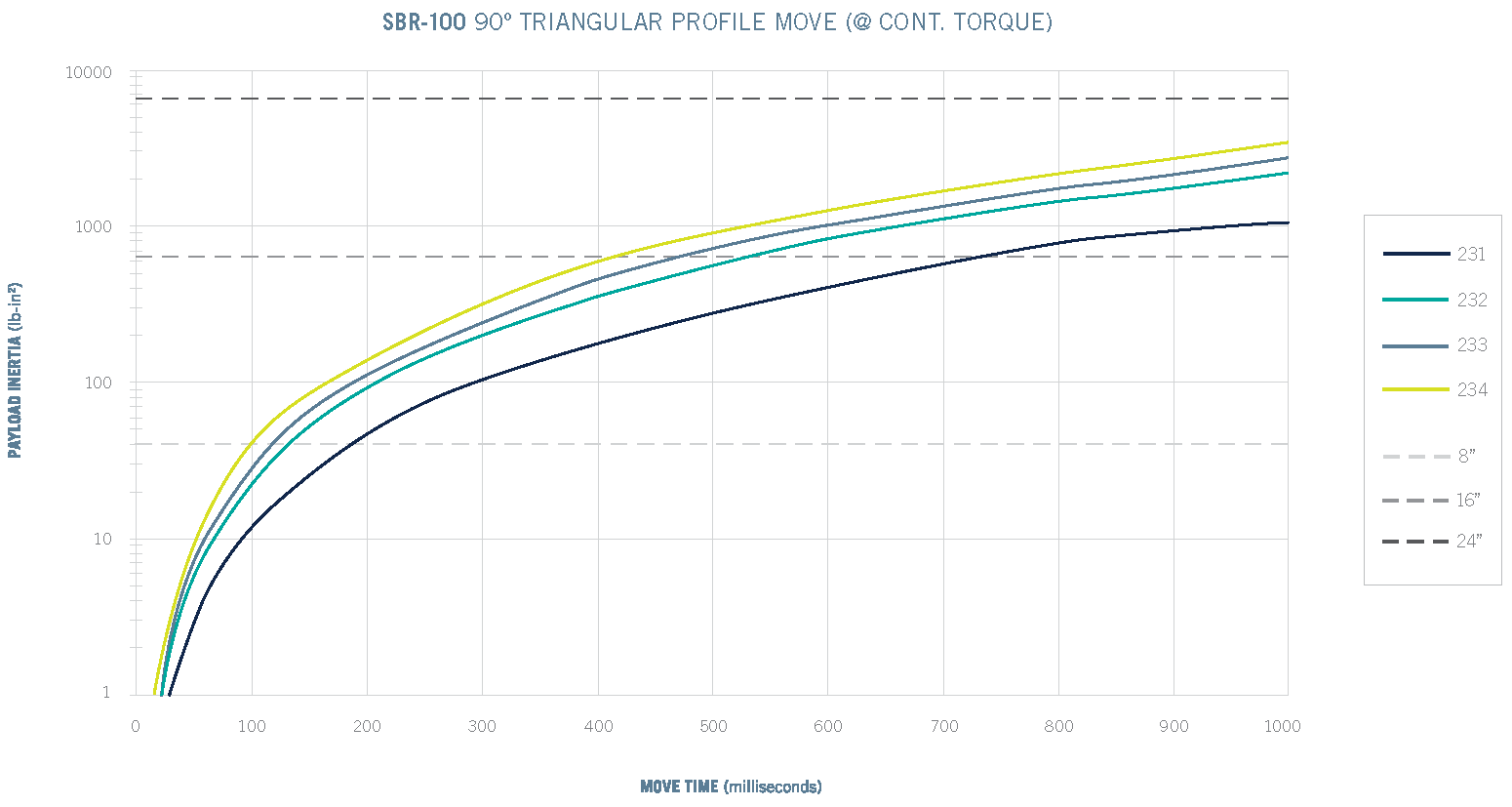
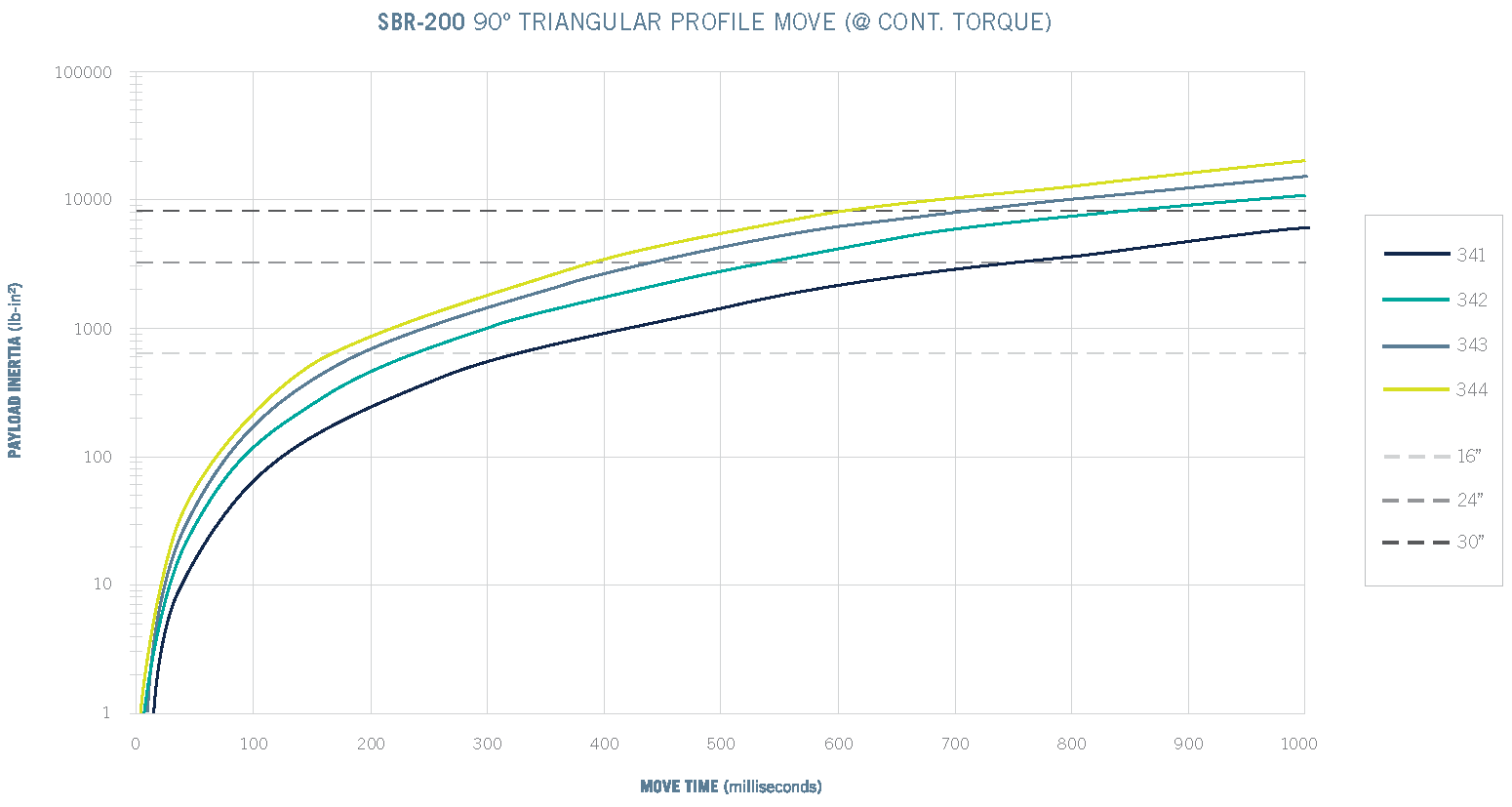
Continuous Torque Examples
Inertia Mismatch Capabilities
When specifying rotary stages, engineers understandably tend to focus on allowable payload. However, the actual mass of the payload on a ServoBelt Rotary (SBR) stage doesn’t come into play because we use extremely robust duplex pair bearings that handle hundreds of pounds both statically and dynamically in the axial and radial directions without reducing service life. When sizing SBR stages, it’s more important to pay attention to the payload’s rotational inertia—also known as the polar or mass moment of inertia. The rotational inertia of the payload affects stage sizing because it determines torque requirements and affects servo authority.