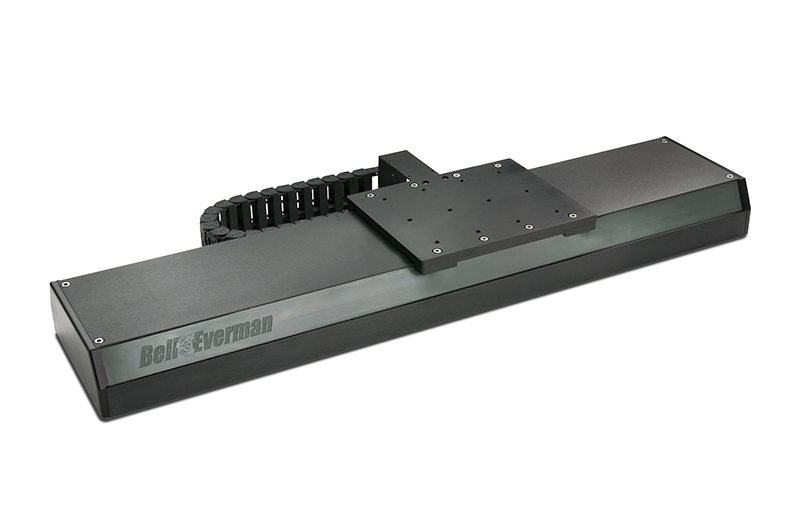
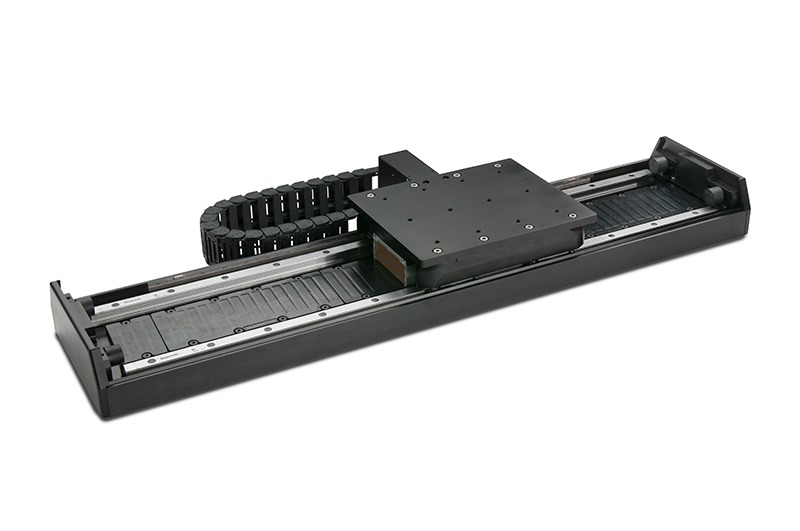
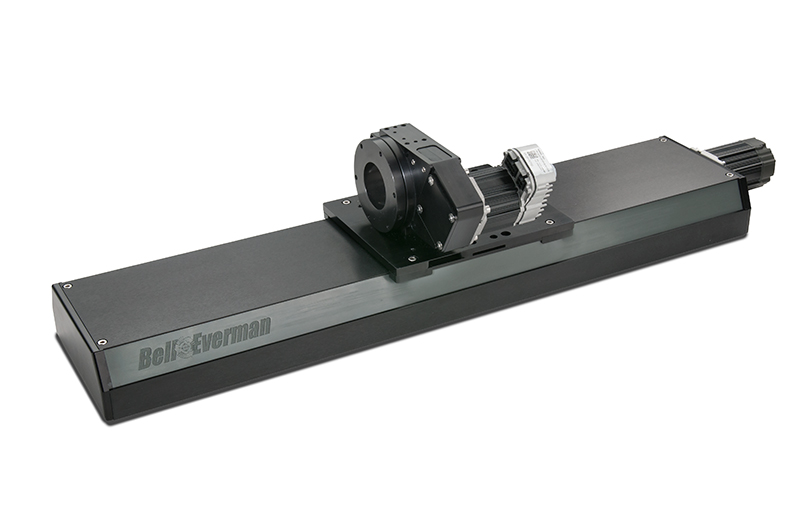
LowBoy Linear Actuators
Precise, modular electromechanical positioning systems
With three different drive mechanisms available in the same compact, aluminum chassis, LowBoy Linear Actuators let you choose the ideal price-to-performance ratio for your application.
The Right Drive. The drive offerings for LowBoy Linear positioning systems offerings consist of:
- Precision Ball Screw
- Air-core Linear Motor
- Iron-core Linear Motor
The price differential between the lowest and highest fidelity in a given size is roughly 20 percent.
Accurate and Repeatable Linear Positioning. These linear actuators have bi-directional repeatabilities of ±0.5 µm for the linear motor models and ±5 µm for the ball screw. All models offer integrated position feedback devices for closed-loop control.
High Force Capabilities. LowBoy Linear Actuators are available now in lengths up to 1,600 mm and can exert continuous linear forces as high as 1,540 N, depending on the drive mechanism.
Compact, Protected Chassis. LowBoy Linear Actuators use one of two low-profile aluminum chassis designs. The Light versions use an 80-mm high by 120-mm wide chassis while the Medium versions have an 80-mm high by 180-mm wide chassis. Both chassis designs feature an integrated cover to protect the drive mechanism from contamination.
Easy Integration. With their compact chassis designs, LowBoy Linear Actuators provide bolt-on integration into any machine requiring a reliable, accurate positioning system.