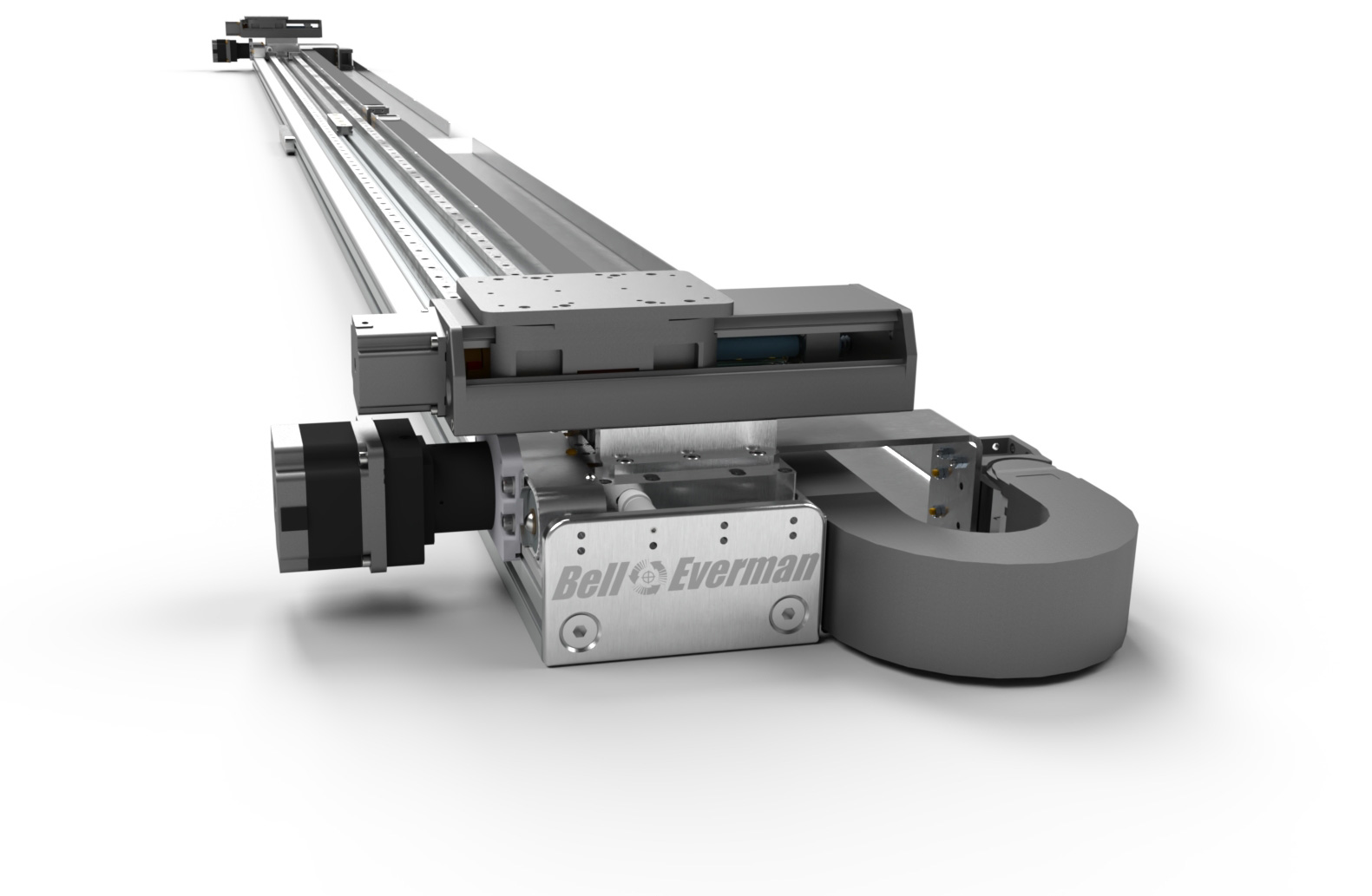
ServoBelt™ Linear Drive
Go the distance with limitless travel lengths
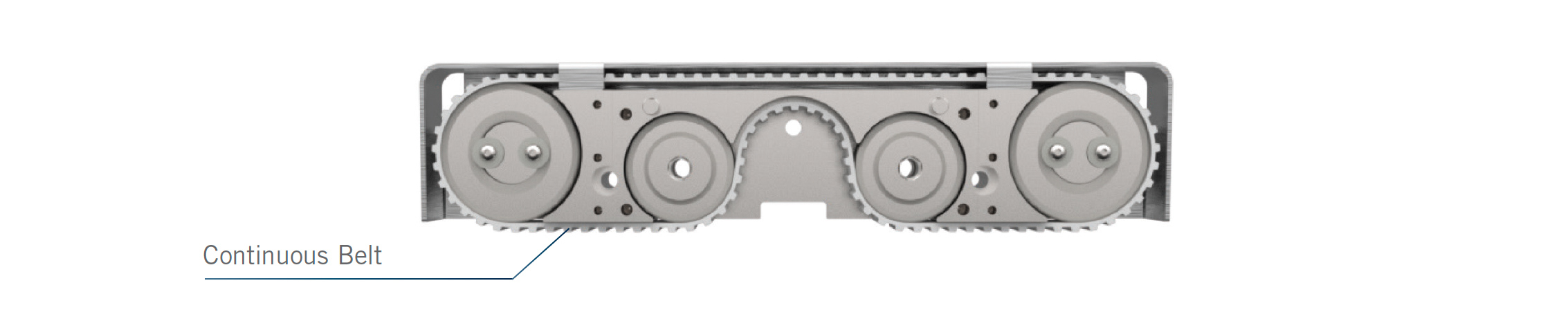
From short stroke precision applications under a meter to long travel transfer robots over 50 meters, ServoBelt™ Linear actuators redefine the classic belt drive. ServoBelt puts belts to work in an entirely new way that reduces the positioning errors and speed limitations of conventional belt drives.
- High Performance, Low Cost. With speeds up to 4 m/s, accuracy to ± 4 µm per meter and bi-directional repeatability of ± 1 encoder count, ServoBelt Linear compares favorably to high-end linear motor drives costing thousands more.
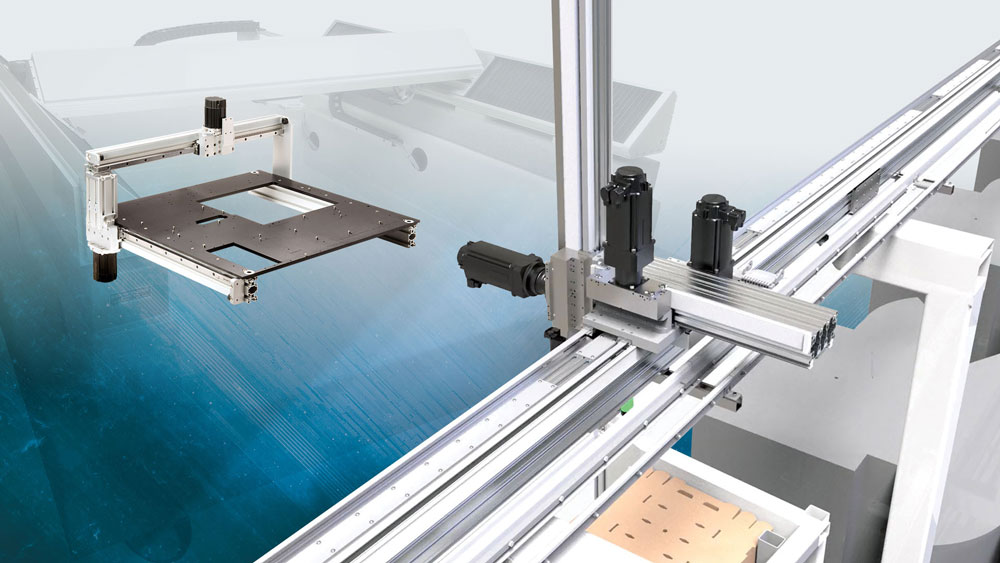
- Limitless Scalability. With a chassis based on standard Bosch-Rexroth T-slot extrusions, ServoBelt Linear can be engineered for travel distances up to 50 meters or more to create large-format motion systems—such as Cartesian transfer robots, material handling systems and large gantry systems.
- Multiple Independent Carriages and Axes. A single ServoBelt Linear axis will support multiple, independently-controlled carriages for complex motion control tasks over any travel distance.

{kind=link}